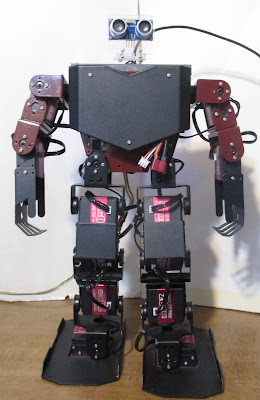
I have finally been able to run this robot. I started the project about a year ago. There was one bad servo that needed replacement. Then I did not have the arm servos mounted correctly. But he is up and running now. You have to assign each servo a number with another interface board and different software before you can assemble the robot.
This is the back view of the robot. The bus servo controller is not the correct one but it works anyway.


This is a link to the video of the robot working on YouTube:
No comments:
Post a Comment