I am using the Adafruit ILI9341 driver found at: https://github.com/adafruit/Adafruit_ILI9341
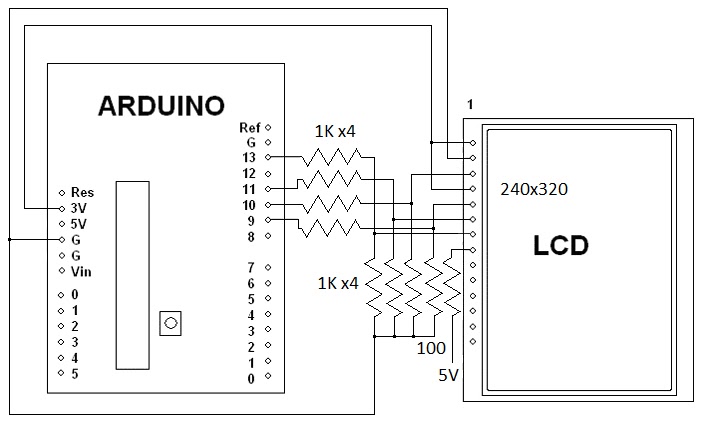
Note that the Adafruit LCD has level shifters for 5 volts built into it.
Here is a video of it working on Youtube.
Here is a video of the LCD being used as an oscilloscope.
Here are a couple of still pictures, only 6 of the 8 bits are connected for these pictures.


Here is the code for a more basic oscilloscope.
/************************************
2.8 SPI PIND TFT Oscope Simple
Reads the D0-D7 pins using PIND,
and shows the value on the screen.
Created 27 july 2015 by Bob Davis
**************************************/
//#include
#include
#include "Adafruit_ILI9341.h"
#include "Adafruit_GFX.h"
// pin definition for the Uno LCD
#define TFT_DC 9
#define TFT_CS 10
// Use hardware SPI (on Uno, #13=clk, #11=mosi) and the above for CS/DC
//Adafruit_ILI9341 tft = Adafruit_ILI9341(TFT_CS, TFT_DC);
Adafruit_ILI9341 tft = Adafruit_ILI9341();
//// set up variables
int Input=0;
byte Sample[320];
int trigger=64;
void setup(){
// initialize rotate and clear the display
tft.begin();
tft.fillScreen(ILI9341_BLACK);
tft.setRotation(1);
// Set the font size
tft.setTextSize(2);
// D input pins
pinMode(0, INPUT);
pinMode(1, INPUT);
pinMode(2, INPUT);
pinMode(3, INPUT);
pinMode(4, INPUT);
pinMode(5, INPUT);
pinMode(6, INPUT);
pinMode(7, INPUT);
}
void loop(){
// wait for a positive going trigger
for (int timeout=0; timeout < 1000; timeout++){
Input = PIND;
if (Input < trigger) break; }
for (int timeout=0; timeout < 1000; timeout++){
Input = PIND;
if (Input > trigger) break; }
// quickly collect the data with no delay
for (int xpos=0; xpos <320; xpos++){
Sample[xpos]=PIND;
// display the collected data
for (int xpos=0; xpos <319; xpos++){
// erase the old and draw new line
tft.drawLine(xpos+1, 0, xpos+1, 240, ILI9341_BLACK);
tft.drawLine(xpos, (Sample[xpos]*2), xpos+1, Sample[xpos+1]*2, ILI9341_WHITE);
}
}
// End of program
There is more info on the analog to digital converter at http://bobdavis321.blogspot.com/2015/06/arduino-5msps-oscilloscope-revisited.html













