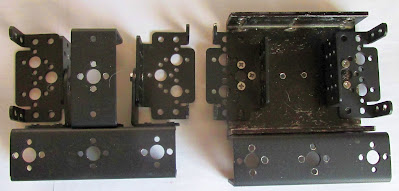
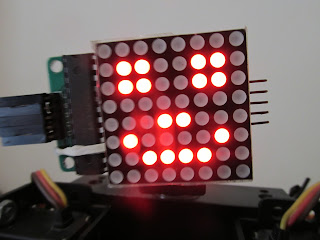
In my book "Arduino Servo Projects" I made all kinds of Humanoid Robots. But none of them were the 17 DOF Humanoid as is found on eBay. I just could not get it to work. It has a high tendency to fall over a lot. In this guys video it fell off the table: https://www.youtube.com/watch?v=-gQDgxQkX-w ! So I spent some time trying to fix him. One thing I noticed is that his legs are too long. Even with the higher power MG958 servos when he falls over and I pick him up the servos then go to where they were supposed to. The servos just cannot lift his weight! Then as I was studying him I found the mistake! Can you see it in the pictures below?
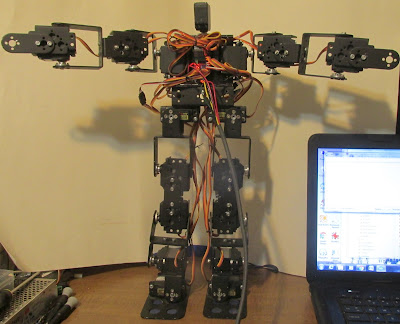


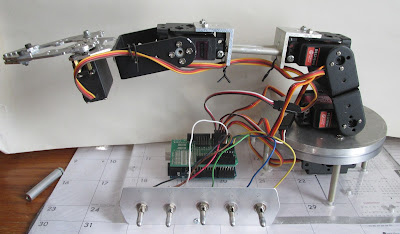
Did you find the problem? I circled it in red in this picture. The servo is mounted upside down!